
Encoder là gì? Cấu tạo, nguyên lý và cách chọn encoder
Encoder là gì (tóm tắt nhanh):
– Thiết bị đo vị trí, tốc độ, hướng quay
– Chuyển chuyển động → tín hiệu điện
– Gồm 2 loại chính: tuyệt đối và tương đối
Trong hầu hết máy móc công nghiệp hiện đại từ robot, máy CNC đến thang máy và băng tải đều có một linh kiện nhỏ nhưng cực kỳ quan trọng đó là encoder.
Thiếu encoder, hệ thống điều khiển không biết trục đang ở đâu, quay bao nhanh, hay quay theo chiều nào. Bài viết này giải thích đầy đủ encoder là gì, cách phân loại, nguyên lý hoạt động và hướng dẫn thực tế để chọn đúng encoder cho ứng dụng của bạn.
1. Encoder là gì? Định nghĩa chuẩn kỹ thuật
Encoder (bộ mã hóa) là một thiết bị cơ điện có chức năng chuyển đổi chuyển động cơ học, quay tròn hoặc tịnh tiến thành tín hiệu điện số hoặc xung. Tín hiệu đầu ra này được hệ thống điều khiển sử dụng để xác định chính xác vị trí, tốc độ, góc quay và chiều chuyển động của trục máy hoặc cơ cấu cơ học.
Trong tiếng Anh, thuật ngữ encoder có nghĩa là “bộ mã hóa”, phản ánh đúng bản chất hoạt động: thiết bị mã hóa trạng thái vật lý thành ngôn ngữ tín hiệu mà hệ thống điều khiển (PLC, servo drive, CNC controller…) trong các hệ thống servo motor và industrial automation có thể hiểu và xử lý.
Theo định nghĩa kỹ thuật của SICK Sensor – một trong những hãng encoder hàng đầu thế giới: encoder là “cảm biến chuyển động cơ học tạo ra tín hiệu kỹ thuật số đáp ứng với chuyển động.”
Encoder dùng để:
- Đo vị trí: Xác định chính xác góc quay hay vị trí tuyến tính của trục tại bất kỳ thời điểm nào.
- Đo tốc độ: Tính toán số vòng/phút (RPM) hoặc tốc độ dài của băng tải, trục truyền động.
- Xác định chiều quay: Phân biệt chiều quay thuận/nghịch nhờ hai kênh tín hiệu lệch pha 90°.
- Phản hồi vòng kín: Cung cấp tín hiệu hồi tiếp (feedback) cho hệ thống điều khiển vòng kín (feedback control system) trong servo và tự động hóa
2. Cấu tạo của encoder
Dù có nhiều loại Encoder với công nghệ khác nhau, nhìn chung một bộ Encoder quay điển hình gồm các thành phần chính sau:
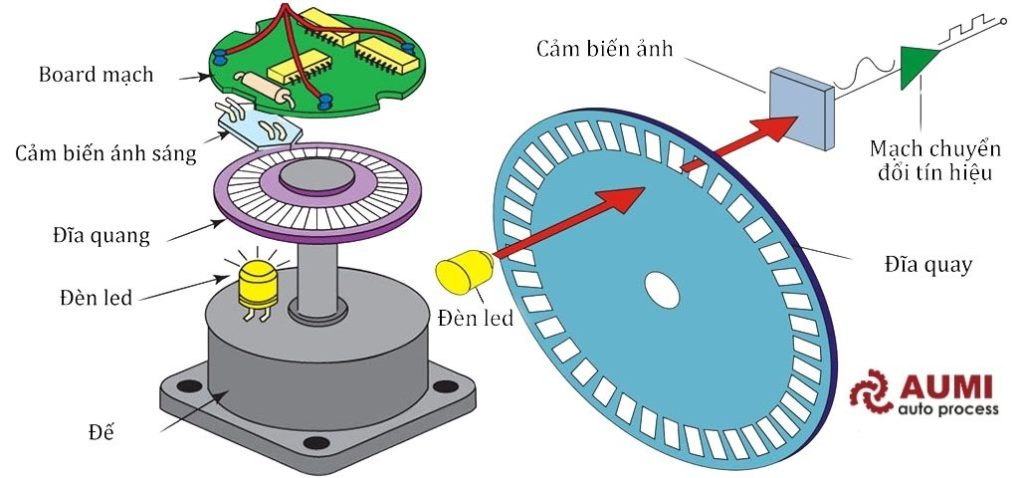
2.1 Đĩa mã hóa (Code Disk)
Đây là bộ phận trung tâm của encoder quang học. Đĩa được làm bằng vật liệu trong suốt (thủy tinh hoặc nhựa) hoặc kim loại, trên bề mặt có khắc các khe hở (vạch sáng) và vùng không trong suốt (vạch tối) được chia đều theo chu vi. Mật độ vạch quyết định độ phân giải của encoder — số xung trên mỗi vòng quay (PPR – Pulses Per Revolution).
2.2 Nguồn sáng (LED/Nguồn phát)
Thường là đèn LED hồng ngoại chiếu ánh sáng qua đĩa mã hóa. Khi đĩa quay, ánh sáng bị ngắt quãng liên tục, tạo ra chuỗi tín hiệu sáng–tối tương ứng với các vạch trên đĩa.
2.3 Bộ thu quang (Photodetector)
Nhận ánh sáng đi qua đĩa và chuyển đổi thành tín hiệu điện. Chất lượng photodetector ảnh hưởng trực tiếp đến độ nhạy, tốc độ đáp ứng và khả năng chống nhiễu của encoder.
2.4 Mạch xử lý tín hiệu
Tín hiệu điện thô từ photodetector được khuếch đại, so sánh ngưỡng và định hình lại thành xung vuông chuẩn. Mạch này cũng tạo ra các kênh tín hiệu A, B (lệch pha 90°) và Z (xung index một lần/vòng quay).
2.5 Vỏ bảo vệ cơ học
Vỏ bọc bằng nhôm hoặc thép không gỉ bảo vệ các linh kiện bên trong khỏi bụi, ẩm và va đập. Cấp bảo vệ IP (Ingress Protection) xác định khả năng chống nước và bụi — encoder công nghiệp thường có IP65, IP67 hoặc IP69K cho môi trường khắc nghiệt.
3. Nguyên lý hoạt động của encoder
Encoder hoạt động dựa trên nguyên lý chuyển đổi chuyển động cơ học thành tín hiệu điện theo một trong hai cơ chế phổ biến sau:
3.1 Nguyên lý quang học (Optical)
Khi trục encoder quay, đĩa mã hóa gắn trên trục cũng quay theo. Nguồn LED chiếu ánh sáng liên tục qua đĩa — mỗi khi ánh sáng đi qua khe hở, photodetector nhận tín hiệu (mức cao “1”); khi bị che khuất, photodetector không nhận được tín hiệu (mức thấp “0”). Kết quả là chuỗi xung số được tạo ra tỷ lệ trực tiếp với góc quay và tốc độ của trục.
3.2 Nguyên lý từ tính (Magnetic)
Thay vì đĩa quang, encoder từ tính sử dụng một bánh răng hoặc đĩa nam châm gắn trên trục. Khi quay, từ trường biến đổi theo chu kỳ được cảm biến Hall hoặc cảm biến từ trở (magnetoresistive) phát hiện và chuyển thành tín hiệu điện tương ứng.
3.3 Tín hiệu đầu ra: kênh A, B, Z
| Kênh | Chức năng | Thông tin bộ điều khiển đọc được |
| A | Kênh chính — tạo xung cơ bản | Tần số xung → tính tốc độ; đếm xung → tính góc quay |
| B | Lệch pha 90° so với kênh A | So sánh pha A–B → xác định chiều quay thuận/nghịch |
| Z | Kênh index — 1 xung/vòng | Điểm tham chiếu zero position để home về gốc |
4. Phân loại encoder chi tiết
4.1 Phân loại theo chuyển động đo
Encoder quay (Rotary): Đo góc quay và tốc độ của trục. Phổ biến nhất trong công nghiệp.
- Gắn trực tiếp lên trục động cơ
- Đo vị trí góc 0–360°
- Ứng dụng: servo, robot, CNC
Encoder tuyến tính (Linear): Đo chuyển động thẳng (tịnh tiến) theo một trục.
- Dạng thước đo quang (linear scale)
- Độ chính xác nm–μm
- Ứng dụng: máy đo CMM, máy in PCB
4.2 Phân loại theo tín hiệu đầu ra
Encoder tuyệt đối (Absolute): Mỗi vị trí góc có một mã số duy nhất, không bị mất khi mất điện.
- Giữ vị trí sau khi tắt/mở nguồn
- Không cần home về điểm gốc
- Giao tiếp: SSI, CANopen, PROFINET, EtherCAT
- Đơn vòng (singleturn) hoặc đa vòng (multiturn)
Encoder tương đối (Incremental): Tạo xung theo chuyển động, đếm từ điểm tham chiếu ban đầu.
- Giá thành thấp hơn
- Cần reset về điểm home khi mất điện
- Giao tiếp: TTL, HTL, push-pull
- Độ phân giải đến 65.536 xung/vòng
4.3 Bảng chọn nhanh Encoder theo ứng dụng
Dưới đây là bảng chọn nhanh Encoder theo từng ứng dụng thực tế trong công nghiệp, giúp bạn xác định loại Encoder phù hợp một cách nhanh chóng:
| Nhu cầu | Loại Encoder phù hợp |
| Robot, thang máy | Encoder tuyệt đối |
| Băng tải, máy đóng gói | Encoder tương đối |
| Môi trường bụi, rung | Encoder từ |
| Độ chính xác cao | Encoder quang |
| Không thể home | Encoder tuyệt đối |
| Chi phí thấp | Encoder tương đối |
4.4 Phân loại theo công nghệ cảm biến
| Loại công nghệ | Ưu điểm | Nhược điểm | Ứng dụng |
| Quang học (Optical) | Độ chính xác cao nhất, phân giải tốt | Nhạy với bụi, rung | CNC, máy đo, robot |
| Từ tính (Magnetic) | Bền trong môi trường khắc nghiệt | Độ phân giải thấp hơn quang học | Máy xây dựng, ngoài trời |
| Điện dung (Capacitive) | Không tiếp xúc, tuổi thọ cao | Chi phí cao, nhạy nhiễu điện từ | Thiết bị y tế, đo chính xác |
| Cảm ứng (Inductive) | Rất bền, chống nhiễu tốt | Hạn chế tốc độ đáp ứng | Công nghiệp nặng |
5. So sánh Encoder tuyệt đối và Encoder tương đối
| Tiêu chí | Encoder tuyệt đối | Encoder tương đối |
| Dữ liệu khi mất nguồn | ✔ Giữ nguyên vị trí | ✗ Mất dữ liệu, cần reset |
| Cần home khi khởi động | ✔ Không cần | ✗ Phải home về điểm gốc |
| Giao tiếp | SSI, CANopen, PROFINET, EtherCAT, IO-Link | TTL, HTL, Push-Pull, SinCos |
| Độ phân giải | Đến 30 bit (hơn 1 tỷ vị trí) | Đến 65.536 xung/vòng |
| Giá thành | Cao hơn | Thấp hơn |
| Ứng dụng phù hợp | Robot, thang máy, CNC, in ấn | Băng tải, đóng gói, điều tốc |
So sánh nhanh Encoder:
- Encoder tuyệt đối: nhớ vị trí ngay cả khi mất điện, không cần homing
- Encoder tương đối: cần reset (homing) sau khi mất điện để xác định lại vị trí
Lưu ý khi lựa chọn: Trong các ứng dụng an toàn cao (SIL 2/3) như thang máy, cần trục, máy ép công nghiệp — ưu tiên encoder tuyệt đối có chứng nhận Functional Safety đáp ứng tiêu chuẩn EN ISO 13849-1 và IEC 62061.
6. Ứng dụng thực tế của encoder trong công nghiệp

Encoder hiện diện trong hầu hết hệ thống industrial automation hiện đại, từ robot, CNC đến băng tải và năng lượng. Dưới đây là các lĩnh vực ứng dụng phổ biến nhất tại Việt Nam và toàn cầu:
6.1 Máy CNC và gia công cơ khí chính xác
Trong máy CNC (phay, tiện, mài), Encoder được lắp trên các trục servo để đo chính xác vị trí dao cắt với độ phân giải micromet. Phản hồi tín hiệu liên tục giúp bộ điều khiển bù sai số và duy trì chính xác biên dạng gia công theo chương trình CAD/CAM.
6.2 Robot công nghiệp và cánh tay robot
Mỗi khớp (joint) của robot cần ít nhất một Encoder để bộ điều khiển biết góc hiện tại của khớp đó. Robot 6 trục cần 6 Encoder tuyệt đối – đây là lý do Encoder tuyệt đối chiếm ưu thế trong ứng dụng này vì không cần thực hiện chuỗi home sau khi khởi động.
6.3 Thang máy và thiết bị nâng hạ
Encoder đo tốc độ và vị trí cabin thang máy, đảm bảo dừng đúng tầng và kiểm soát tốc độ mở/đóng cửa. Các ứng dụng này thường yêu cầu Encoder có chứng nhận an toàn chức năng SIL.
6.4 Băng tải và hệ thống vận chuyển
Encoder tương đối gắn trên trục con lăn của băng tải giúp đo tốc độ vận chuyển và đồng bộ hóa nhiều băng tải trong dây chuyền sản xuất tích hợp.
6.5 Máy in và đóng gói
Độ chính xác in ấn phụ thuộc vào đồng bộ hóa chuyển động cuộn giấy và đầu in — nhiệm vụ Encoder thực hiện bằng cách cung cấp tín hiệu phản hồi tốc độ và vị trí theo thời gian thực.
6.6 Năng lượng tái tạo (Turbine gió)
Encoder công nghiệp nặng (heavy-duty) theo dõi góc pitch của cánh quạt và tốc độ rotor turbine gió, góp phần tối ưu hóa hiệu suất khai thác năng lượng gió trong mọi điều kiện thời tiết.
7. Hướng dẫn chọn Encoder phù hợp cho ứng dụng
Việc lựa chọn Encoder đúng loại là yếu tố then chốt để đảm bảo hiệu suất hệ thống và giảm chi phí bảo trì. Dưới đây là các tiêu chí kỹ thuật cần xem xét theo thứ tự ưu tiên:
7.1 Xác định yêu cầu vị trí: tuyệt đối hay tương đối?
Nếu máy cần nhớ vị trí sau khi tắt nguồn, hoặc không thể thực hiện chuỗi home (ví dụ robot, thang máy) → chọn Encoder tuyệt đối. Nếu chỉ cần theo dõi tốc độ hoặc đồng bộ chuyển động và có thể home lại khi khởi động → Encoder tương đối đủ dùng và tiết kiệm hơn.
7.2 Độ phân giải (Resolution)
Tính toán độ phân giải cần thiết dựa trên yêu cầu chính xác vị trí của ứng dụng. Ví dụ: nếu một vòng quay tương ứng 10mm chuyển động và cần chính xác 0,01mm → cần ít nhất 1.000 xung/vòng.
7.3 Giao thức truyền thông
Đảm bảo Encoder tương thích với giao thức mà bộ điều khiển (PLC/servo drive) hỗ trợ: TTL, HTL, SSI, PROFINET, EtherCAT, CANopen, IO-Link.
7.4 Điều kiện môi trường
Xem xét nhiệt độ, độ ẩm, bụi, dầu, hóa chất và mức độ rung động. Với môi trường khắc nghiệt, ưu tiên Encoder có cấp bảo vệ IP67/IP69K và vỏ thép không gỉ.
7.5 Kiểu trục và kết nối cơ khí
Lựa chọn giữa trục đặc (solid shaft), trục rỗng (hollow shaft), mặt bích servo hay mặt bích phẳng cho phù hợp với cơ cấu lắp đặt.
Encoder SICK – Giải pháp đo lường chuyển động hàng đầu thế giới
SICK Sensor (Đức) là một trong những nhà sản xuất cảm biến thông minh và hệ thống tự động hóa hàng đầu toàn cầu. Dòng Encoder SICK nổi bật với độ bền cơ học cao, độ chính xác vượt trội và hỗ trợ nhiều giao thức công nghiệp.
AUMI là đại diện phân phối chính thức và duy nhất của SICK Sensor tại Việt Nam, cung cấp đầy đủ các dòng Encoder SICK chính hãng kèm hỗ trợ kỹ thuật chuyên sâu và bảo hành chính thức.

Dưới đây là các dòng sản phẩm Encoder SICK phổ biến nhất tại thị trường Việt Nam:
- DFS60 – Encoder tương đối tiêu chuẩn công nghiệp
- AFS60 – Encoder tuyệt đối đơn vòng quay
- AFM60 – Encoder tuyệt đối đa vòng quay cao cấp
- AHS/AHM36 – Encoder tuyệt đối siêu nhỏ gọn 36mm
⇒ Xem thêm các sản phẩm encoder của SICK tại: https://aumi.com.vn/c/sick-sensor/cam-bien-vong-quay-encoder/
Kinh nghiệm thực tế khi chọn và lắp đặt encoder
Sau hơn 16 năm phân phối và hỗ trợ kỹ thuật Encoder của hãng SICK cho hơn 300 nhà máy tại Việt Nam, đội ngũ kỹ thuật AUMI đúc kết một số kinh nghiệm thực tế quan trọng:
- Chọn sai loại tuyệt đối/tương đối là lỗi phổ biến nhất. Nhiều khách hàng chọn Encoder tương đối cho robot để tiết kiệm chi phí, sau đó tốn nhiều hơn khi mỗi lần mất điện phải home lại toàn bộ hệ thống. Với robot và thang máy, luôn chọn Encoder tuyệt đối.
- Cấp bảo vệ IP thường bị bỏ qua. Encoder IP65 đặt trong môi trường có nước rửa máy áp lực cao sẽ hỏng sau vài tháng. Môi trường có nước/dầu rửa áp lực → cần tối thiểu IP67, tốt nhất IP69K.
- Độ phân giải “dư” không phải vấn đề. Nhiều kỹ sư cố tính toán chính xác PPR tối thiểu. Thực tế, chọn Encoder có độ phân giải cao hơn yêu cầu 3–5 lần không làm tăng đáng kể chi phí nhưng tăng đáng kể biên độ an toàn và khả năng nâng cấp hệ thống sau này.
- Kiểm tra tương thích giao thức trước khi mua. Encoder SSI không thể kết nối trực tiếp vào servo drive chỉ hỗ trợ EnDat. Luôn xác nhận giao thức của bộ điều khiển trước khi chọn model Encoder
- Lắp đặt: trục đồng tâm là yếu tố sống còn. Sai lệch đồng tâm >0,05mm giữa trục máy và trục Encoder sẽ gây rung, tăng tải lên vòng bi và giảm tuổi thọ đáng kể. Luôn dùng khớp nối mềm (flexible coupling) và kiểm tra đồng tâm bằng đồng hồ so khi lắp đặt.
Các câu hỏi thường gặp (FAQ)
Q1: Encoder là gì và dùng để làm gì trong công nghiệp?
A: Encoder là thiết bị dùng để chuyển đổi chuyển động cơ học (quay hoặc tịnh tiến) thành tín hiệu điện. Trong công nghiệp, encoder giúp đo vị trí, tốc độ và hướng quay của động cơ, từ đó cung cấp tín hiệu phản hồi cho PLC hoặc hệ thống điều khiển.
Q2: Encoder và resolver khác nhau như thế nào?
A: Encoder sử dụng tín hiệu số (digital), cho độ chính xác cao và dễ tích hợp với hệ thống điều khiển hiện đại. Trong khi đó, resolver hoạt động theo nguyên lý analog, có độ bền cao hơn trong môi trường khắc nghiệt nhưng yêu cầu bộ chuyển đổi tín hiệu phức tạp hơn.
Q3: Nên chọn encoder quang hay encoder từ?
A: Encoder quang (optical) cho độ chính xác và độ phân giải cao, phù hợp với môi trường sạch. Encoder từ (magnetic) có độ bền tốt hơn, chống bụi, rung và dầu hiệu quả — phù hợp môi trường công nghiệp nặng như thép, xi măng.
Q4: Encoder tuyệt đối và encoder tương đối khác nhau như thế nào?
A: Encoder tương đối (incremental): xuất xung A, B, Z và cần reset khi mất điện
Encoder tuyệt đối (absolute): lưu vị trí ngay cả khi mất nguồn, không cần homing lại
👉 Encoder tuyệt đối phù hợp hệ thống yêu cầu độ chính xác cao và an toàn.
Q5: Singleturn và multiturn encoder khác nhau như thế nào?
A: Singleturn: đo vị trí trong 1 vòng quay (0–360°)
Multiturn: đo được nhiều vòng quay liên tục
👉 Multiturn thường dùng trong thang máy, cần trục, băng tải dài.
Q6: Các thông số quan trọng khi chọn encoder là gì?
A: Khi chọn encoder, cần chú ý:
- Độ phân giải (PPR hoặc bit)
- Loại tín hiệu (TTL, HTL, analog…)
- Chuẩn giao tiếp (SSI, PROFINET, EtherCAT…)
- Cấp bảo vệ IP (IP65, IP67, IP69K)
- Kiểu trục (solid shaft / hollow shaft)
Q7: Encoder giá bao nhiêu? Có đắt không?
A: Giá encoder phụ thuộc vào loại và thương hiệu:
- Encoder cơ bản: ~800.000 – 2.000.000 VNĐ
- Encoder công nghiệp phổ biến: ~1.500.000 – 5.000.000 VNĐ
- Encoder cao cấp (độ phân giải cao, giao thức truyền thông): có thể >10 triệu VNĐ
👉 Việc chọn đúng Encoder theo ứng dụng giúp tối ưu chi phí và tránh sai số trong vận hành.
Q8: Mua encoder ở đâu uy tín, đảm bảo chính hãng?
A: Nên chọn nhà cung cấp có kinh nghiệm trong tự động hóa công nghiệp, có khả năng tư vấn kỹ thuật và hỗ trợ sau bán hàng.
Việc lựa chọn encoder không chỉ phụ thuộc vào giá mà còn phụ thuộc vào yêu cầu vị trí, môi trường và hệ thống điều khiển. Lựa chọn đúng ngay từ đầu giúp giảm chi phí bảo trì và tăng độ ổn định lâu dài cho toàn bộ hệ thống.
👉 AUMI là đơn vị cung cấp Encoder chính hãng của SICK tại Việt Nam, đồng thời hỗ trợ lựa chọn model phù hợp theo từng ngành như thép, thực phẩm, xi măng… giúp doanh nghiệp đảm bảo hiệu suất và độ bền hệ thống.
Liên hệ AUMI – Đại diện phân phối chính thức của SICK tại Việt Nam để được tư vấn và báo giá nhanh:
📞 0917 991 589 | 📧 [email protected] |
Địa chỉ:
- Văn phòng Hà Nội: B44 lô nhà vườn khu đô thị Việt Hưng, phường Việt Hưng, TP Hà Nội
- Văn phòng Hồ Chí Minh: Tầng 2, tòa nhà HS, 260/11 Nguyễn Thái Bình, phường Bảy Hiền, TP Hồ Chí Minh
- VP Đà Nẵng: Tầng 9, tòa nhà PV bank, số 2 đường 30-4, phường Hòa Cường, TP Đà Nẵng
AUMI cam kết hàng chính hãng, CO/CQ đầy đủ – tư vấn đúng kỹ thuật, tối ưu chi phí.









